2023. 10. 2. 19:32ㆍ카테고리 없음
- paper : : Boschetti, G.; Sinico, T.; Trevisani, A. Improving Robotic Bin-Picking Performances through Human–Robot Collaboration. Appl. Sci. 2023, 13, 5429. https://doi.org/ 10.3390/app13095429
Bin picking을 하기 위한 중요한 과제는 먼저 3D Object detection, 6d pose estimation, Grasping strategies, path planning 마지막으로 collision avoidance 가 있을 수 있겠다. 하지만 결과적으로 이 모든 Task를 잘 수행하도록 하는것은 어렵고 또한 표준화하는것이 상당히 어려운것이 현 시점이다.
Bin Picking에서 일어날 수 있는 실패의 상황들을 가정해보자.
Object recognition failures : 이는 물체의 인지 실패로 비전 알고리즘에 문제가 있는 경우다. 보통 반짝이거나 투명한 물체에서 자주 일어날 수 있다.
Pose estimation failures : 6D pose가 정확히 인식되지 않아서 최정적으로 후속 그립에 실패하는 경우이다. 이는 주로 비전 센서 Calibration 혹은 부정확한 자세 추정 알고리즘이 원인일 가능성이 높다.
Failures because of constraints on robot motion : 엔드 이팩터의 충돌없이 계산된 물체 자세에 도달할 수 없을 경우를 말하며 보통 흡입 그리퍼들은 보통 더 컴팩트하고 평행 그리퍼 보다 더 쉽게 bin의 가장자리에 도달한다.
Grasping failures : 물체 인식 및 자세 추정에 성공하더라도 물체의 곂침 또는 고르지 못한 표면 등 여러가지 이유로 파지에 실패할 수 있다.
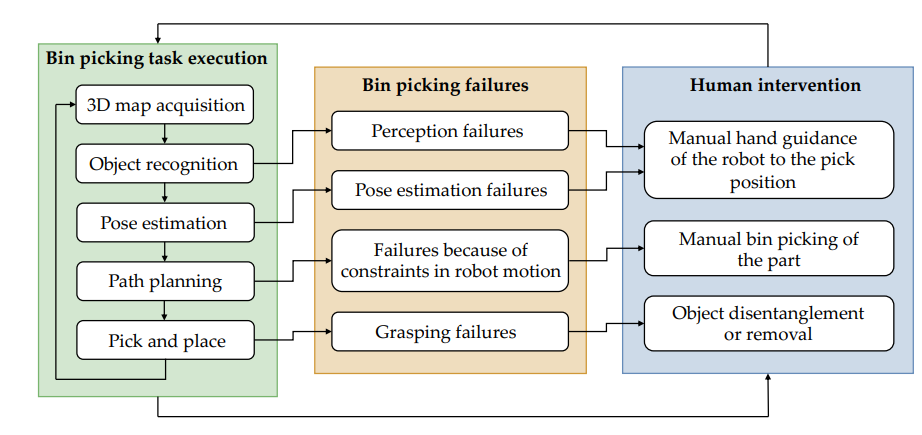
저자는 따라서 위 같은 상황들을 보완하기 위해 사람과 로봇이 협동하여 문제들을 처리해야한다고 주장하며 다음과 같이 협동 방식에 대해 제안한다. 논문 뒤에는 협동방식에 대해 설명이 나오는데 이 내용은 생략하도록 하겠다. 로봇을 인간과 동행해서 사용한다는 생각을 해보진 못했던것 같은데 무언가 현재 직면하고 있는 다양한 문제들을 해결하기 위한 방법으로서 사람과 함께 로봇이 일하는 방향을 제시한 것이 흥미로운것 같다.